Robotic Writer — 5-DOF Scorbot III Simulation
A full simulation and control environment for a 5-DOF Scorbot III robotic arm that picks letter blocks and spells words. Uses Denavit-Hartenberg convention with analytical closed-form inverse kinematics for real-time performance.

Business Context
Robotic manipulation requires solving both forward and inverse kinematics in real time. The inverse problem — finding joint angles for a desired end-effector position — has multiple solutions and must be computed efficiently for smooth trajectory execution. A 5-DOF serial manipulator like the Scorbot III presents a tractable but non-trivial kinematic chain that serves as an excellent educational and research platform for exploring these fundamentals.
Strategic Value
The system provides a complete simulation and control environment using Denavit-Hartenberg convention with analytical closed-form inverse kinematics — no iterative numerical methods, enabling smooth real-time trajectory execution. The robot picks letter blocks from a circular arc and spells words, requiring trajectory planning, multi-joint interpolation, gripper coordination, and workspace awareness. Three hardware backends (Scorbot III serial, Arduino steppers, MATLAB Engine) support deployment from educational to research contexts. What started as a 2004 lab exercise evolved into a full kinematics exploration tool with interactive 3D visualization.
The Challenge
Controlling a 5-DOF robotic arm requires solving both forward and inverse kinematics in real-time. The inverse problem — finding joint angles for a desired end-effector position — has multiple solutions and must be computed efficiently for smooth motion.
Our Approach
Denavit-Hartenberg systematic parameterization for 5-joint kinematic chain. Homogeneous transformation T₀₅ = T₀₁·T₁₂·T₂₃·T₃₄·T₄₅ with analytical closed-form inverse kinematics. Interactive 3D simulation with Dash/Plotly, multiple hardware backends (Scorbot III serial, Arduino steppers, MATLAB Engine), REST API.
Key Performance Indicators
| KPI | Baseline | Result | Impact |
|---|---|---|---|
| Kinematics | Trial and error joint control | Analytical DH inverse kinematics | Real-time Cartesian control |
| Hardware Support | Single robot interface | 3 backends (Scorbot, Arduino, MATLAB) | Flexible deployment |
Architecture
robotic writer
The Task
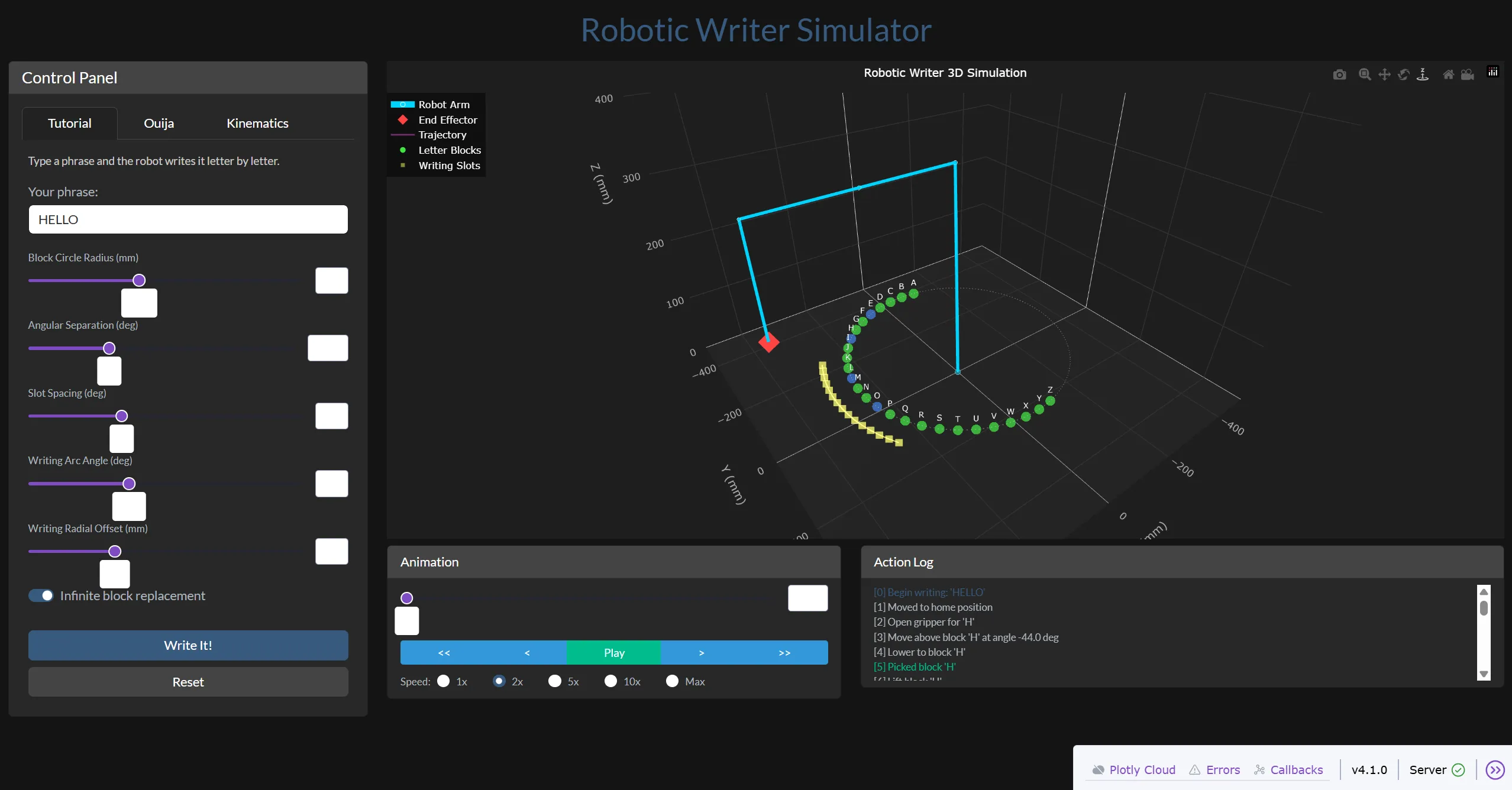
A 5-DOF Scorbot III robotic arm picks letter blocks arranged on a circular arc and places them to spell words. What started as a 2004 lab exercise at Universidad de Concepción became a complete kinematics exploration environment — forward and inverse kinematics, trajectory planning, and multi-hardware control.
Denavit-Hartenberg Kinematics
The Scorbot III is modeled using the standard DH convention. The forward kinematics chain T₀₅ = T₀₁·T₁₂·T₂₃·T₃₄·T₄₅ computes end-effector pose from joint angles — five 4×4 homogeneous transformation matrices multiplied to give the complete gripper position and orientation.
The inverse problem — given a target (x, y, z, pitch, roll), find the joint angles — uses analytical closed-form solutions computed geometrically. No iterative numerical methods, no convergence issues, no local minima. This is critical for smooth real-time trajectory execution where the robot must move fluidly between pick and place positions.
| Joint | Type | θ | d | a | α |
|---|---|---|---|---|---|
| Base | Revolute | θ₁ | d₁ | 0 | -90° |
| Shoulder | Revolute | θ₂ | 0 | a₂ | 0° |
| Elbow | Revolute | θ₃ | 0 | a₃ | 0° |
| Pitch | Revolute | θ₄ | 0 | 0 | -90° |
| Roll | Revolute | θ₅ | d₅ | 0 | 0° |
The writing task requires trajectory planning between pick/place positions, coordinated multi-joint interpolation for natural motion, timed gripper open/close sequences, and workspace boundary awareness. Three hardware backends support different contexts: Scorbot III serial communication, Arduino stepper control, and MATLAB Engine integration.
Technology Stack
Application Screenshots
Technical Diagrams

robot dh frames

robot workspace